
¿Qué es el bus CAN?
Al hablar de la interconexión de vehículos, seguro que ha oído hablar del término "bus CAN". ¿Qué es el bus CAN? ¿Cómo funciona?
¿Qué es el bus CAN?
"CAN bus" significa Bus de red de área de controlador (bus CAN). Es un protocolo basado en mensajes para comunicaciones serie en automóviles.
En la industria del automóvil, en aras de la seguridad, la comodidad y la conveniencia, una variedad de unidades de control electrónico (ECU) se han fabricado. Los vehículos más avanzados suelen incluir un mayor número de ECU y más sofisticadas, como unidades de control del motor, airbags, ABS, sistemas electrónicos de inyección de combustible, etc.

Esos sistemas varían en tipos de datos y requisitos de confiabilidad de la comunicación. Para adaptarse a esas diferencias, se necesitan más buses, lo que puede resultar en un aumento de cables a bordo. Para abordar la necesidad de reducir el número de cables y permitir grandes volúmenes de comunicaciones rápidas a través de múltiples redes locales (LAN), en 1986, BOSCH, una empresa conocida por desarrollar y producir electrónica para automóviles, creó el protocolo CAN bus para vehículos. Posteriormente, el CAN bus se estandarizó a través de las normas ISO11898 e ISO11519 y ahora es un protocolo estandarizado en Europa para las redes de vehículos.
¿Cómo funciona el bus CAN?
Los sensores instalados alrededor del vehículo están monitoreando constantemente el estado del vehículo y envían los datos a las unidades de control respectivas. Por ejemplo, los datos de la presión del aire, la temperatura del motor y la velocidad del motor recopilados por los sensores llegan a la unidad de control del motor, la cual, mediante análisis y procesamiento, envía comandos para controlar la cantidad de combustible que se inyecta.
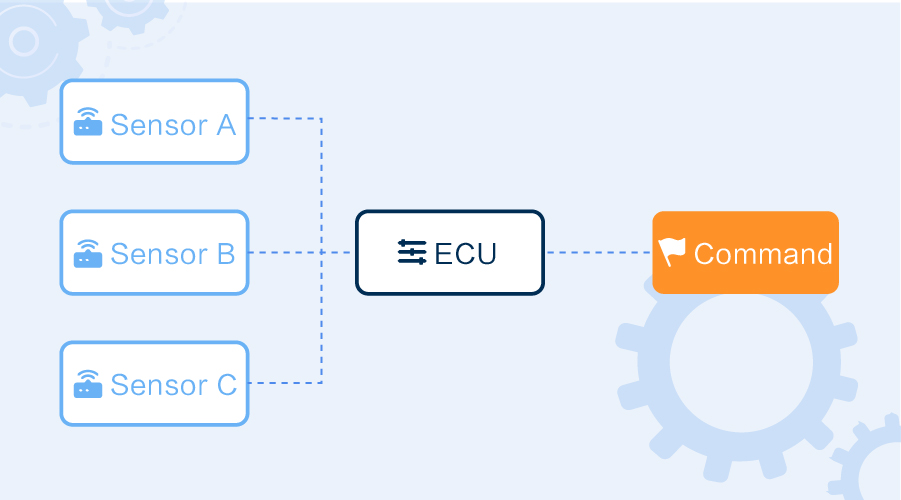
Las unidades de control electrónico (ECUs) a bordo no funcionan de manera independiente. En cambio, necesitan compartir información para colaborar de manera más efectiva. Esto implica requisitos para la transmisión de datos.
Generalmente, la comunicación entre las ECUs se lleva a cabo de dos maneras.
Primero, cada mensaje individual se transmite a través de cables independientes. Por ejemplo, si se necesitan intercambiar 5 señales entre dos unidades de control, entonces se necesitan 5 cables independientes. Cuantos más mensajes haya, más cables y más pines entre las unidades de control.
Segundo, todos los mensajes entre las unidades de control se transmiten a través de dos cables. De esta manera, todos los mensajes, independientemente de sus tamaños, pueden moverse a través de los dos cables.
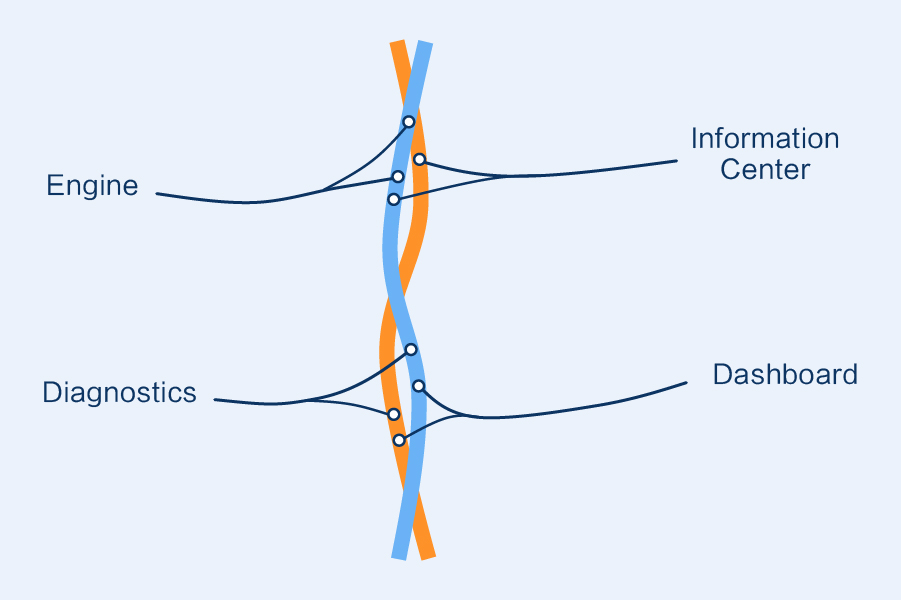
Estos cables se denominan CAN bus.
El bus CAN es un bus de tipo broadcast sin ordenador central. Todos los nodos pueden "oír" todas las transmisiones invariablemente y no hay manera de enviar un mensaje a un nodo en particular - a menos que con ajustes especiales.
CAN bus vs. OBD
A veces puede que veas otra palabra acompañando a CAN bus - OBD. Entonces, ¿qué es el DAB? ¿Cuál es la diferencia entre CAN bus y OBD?
DAB es la abreviatura de On-board Diagnostics, que es una norma establecida por Europa y EE.UU. que se utiliza para controlar los sistemas de los automóviles relacionados con las emisiones (por ejemplo, motores y cajas de cambio). El DAB define los formatos de los servicios de diagnóstico y las transmisiones de datos que deben admitir los sistemas relacionados y ayuda a registrar los fallos y alertar al propietario del vehículo.
La transmisión de datos del OBD necesita ser soportada por un enlace de datos subyacente. Este enlace puede ser el bus CAN u otros tipos de buses como el bus K.
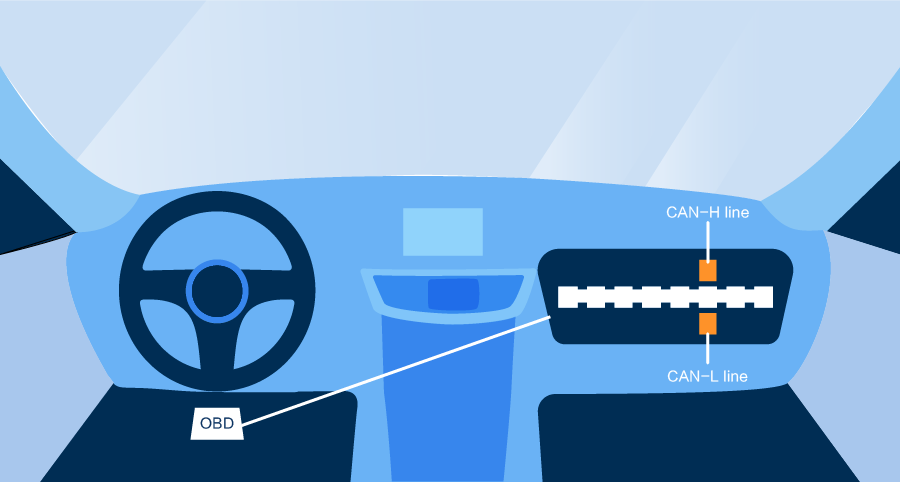
¿Lo ve? El bus CAN es el enlace de datos subyacente para la comunicación LAN del controlador del vehículo, mientras que el OBD es un sistema de autodiagnóstico que funciona basado en el bus CAN.
¿Qué tiene de especial el bus CAN?
Las características especiales de los entornos a bordo de los vehículos imponen elevados requisitos en cuanto a facilidad de uso, fiabilidad y costes de los sistemas de comunicación. El estándar de bus CAN se aplica ampliamente en todos los vehículos y muchas otras máquinas debido a las siguientes ventajas:
Sencillo y barato
Como ya se ha dicho, todas las ECU pueden comunicarse a través de dos hilos de bus CAN en lugar de complejas líneas de señales analógicas, lo que reduce errores, peso, cableado y costes.
Totalmente centralizado
El bus CAN proporciona "un punto de entrada" para comunicarse con todas las ECU de la red, lo que permite el diagnóstico centralizado, el registro de datos y la configuración.
Extremadamente robusto
El sistema de bus CAN está suficientemente reforzado para soportar perturbaciones eléctricas e interferencias electromagnéticas. Esto hace que pueda instalarse en una amplia gama de vehículos, incluidas aplicaciones críticas para la seguridad.
Eficaz
La comunicación dentro del sistema de bus CAN se prioriza por ID. Los datos de máxima prioridad obtienen acceso inmediato al bus sin causar la interrupción de los demás.
Fácil despliegue
El bus CAN es un estándar probado con un rico ecosistema de soporte, lo que facilita su instalación en diversos vehículos.
Aplicaciones del bus CAN
Dotado de excelentes capacidades de control y detección de fallos, el bus CAN es un protocolo ideal para el diagnóstico de vehículos. En realidad, su adopción va mucho más allá y abarca casi todas las industrias.
